在第28届MobiCom2024国际会议上,由天目山实验室、北京航空航天大学、卡内基梅隆大学和香港中文大学的研究团队共同开发的题为《αLiDAR: An Adaptive High-Resolution Panoramic LiDAR System》的项目获得了广泛关注。该系统通过可控的主动旋转机制,显著提升了激光雷达(LiDAR)的视野、分辨率和适应性,使其在自动驾驶和机器人等应用领域的性能超越了传统激光雷达的局限性。

图 1 αLiDAR原理流程图
01传统激光技术革新
LiDAR技术在自动驾驶、机器人及测绘领域发挥着关键作用,但传统激光雷达往往受限于静态设计,视野(FOV)狭窄、分辨率有限,且缺乏灵活的聚焦能力。为应对这些挑战,天目山实验室胡庆雷教授团队积极开展国际合作,在多方协作下,共同开发了αLiDAR系统。该系统采用了一种创新的主动旋转机制,不仅扩展了LiDAR的视野,还可对感兴趣的特定区域进行动态聚焦。通过模拟人类双眼的功能,αLiDAR具备像“头部”一样的可控运动结构,将视角自由地转向不同方向,实现360度的全景感知。

图 2 αLiDAR原型机
02各类应用性能卓越
αLiDAR在多个实际场景中进行了测试,表现显著优于传统LiDAR系统。具体来说,αLiDAR在3D地图构建任务中,测绘精度提升了8.5倍,覆盖率增加了2倍,点云密度增加了1.6倍。此外,在物体检测方面,该系统将有效感知距离增加了1.8倍,所感知物体的数量也增加了1.9倍。
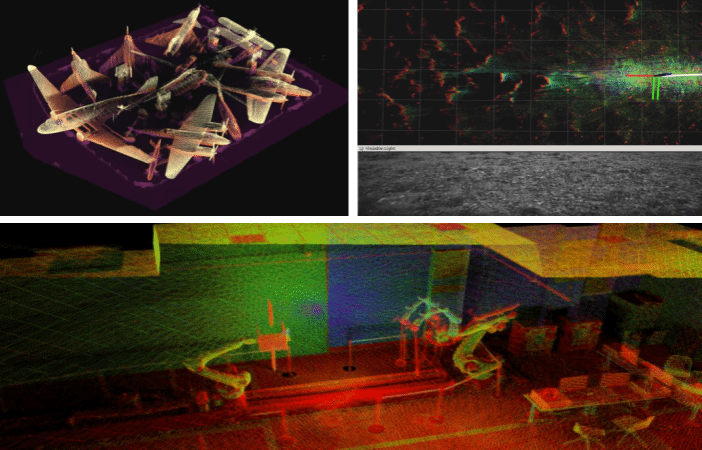
图 3 αLiDAR三维建模实例
03代码开源技术共享
MobiCom作为计算机网络和移动计算领域的顶级国际学术会议,一直秉持着“只求精品”的原则,汇集了众多尖端科研创新。αLiDAR的成功展示标志着在自动驾驶和智能环境感知方面迈出了重要一步,推动了激光雷达技术在未来实际应用中的更广泛使用和发展。
天目山飞行器智能感知与测试实验室研究团队在MobiCom2024会议上进行实时演示,展示αLiDAR安装在无人机上,在不同环境中扫描周围环境并生成高效、精确的点云图像的过程,充分体现αLiDAR如何有效地克服盲区,增强环境感知能力。
αLiDAR的功能展示链接地址为:
https://youtu.be/x4zc_I_xTaw
软硬件实现已开源:
https://github.com/HViktorTsoi/alpha_lidar
