成果发表
近年来,低空经济的快速发展正逐渐成为驱动未来经济增长的新引擎。在城市管理、环境监测、应急救援等复杂、多变的应用场景中,通过跨域多模态无人系统协同合作、信息共享、任务分配等方式,可以在降低单机成本的同时大幅提升整体系统的任务执行效率和灵活性。天目山实验室向锦武院士、李道春教授团队针对子母式无人机协同控制开展了深入研究,在机器人前沿期刊《IEEE Robotics and Automation Letters》发表论文。
子母式无人机系统由大型无人母机携带微小型子机构成,可以极大程度地扩展灾情快速获取系统的应用区域。子机在回收过程中会受到母机螺旋桨气流的干扰,极大影响其降落精度和回收成功率,为了克服这个难点,实现子母式无人机精准回收,团队以天目山实验室为第一完成单位,发表了题为 “Aerial Landing of Micro UAVs on Moving Platforms Considering Aerodynamic Interference(考虑气动干扰的微型无人机空中移动平台自主降落方法)” 的论文,介绍了他们研发的无人机空中平台自主降落轨迹规划方法,这一成果首次实现了考虑气动干扰的微型无人机全自主高精度空中回收。
在该研究中,针对无人机空中降落风险高、降落效率低的问题,首次考虑多无人机气动干扰对无人机空中平台降落的影响,基于旋翼准定常气动干扰模型、机间气动干扰规律以及气动仿真数值模拟,发展了子机受扰推力损失快速预测模型,建立了子母机安全飞行包络并确定了最小化机间气动干扰的着陆锥模型。
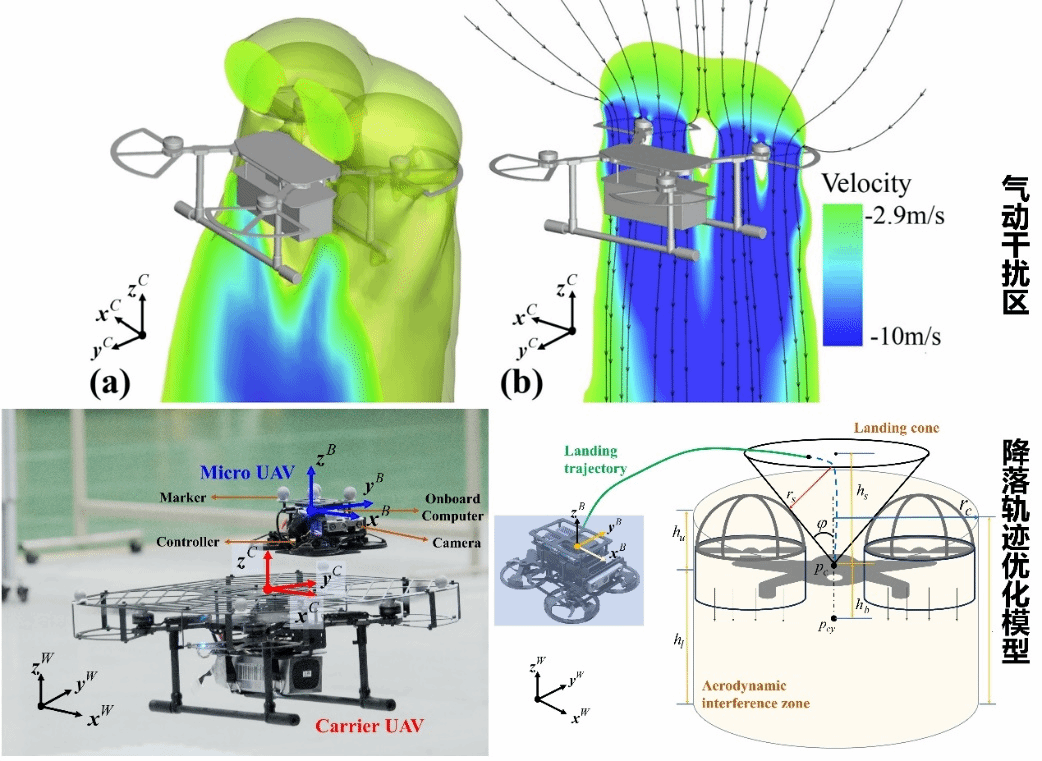
在此基础上,团队以最小化降落过程中的机间气动干扰为目标构建了轨迹优化函数,采用拟牛顿法构建了快速降落轨迹实时迭代优化方法,实现了微型无人机在空中平台的快速安全降落,解决了多无人机气动干扰下的空中移动平台自主降落问题,为子母式无人机的全自主释放回收提供了方法指导。
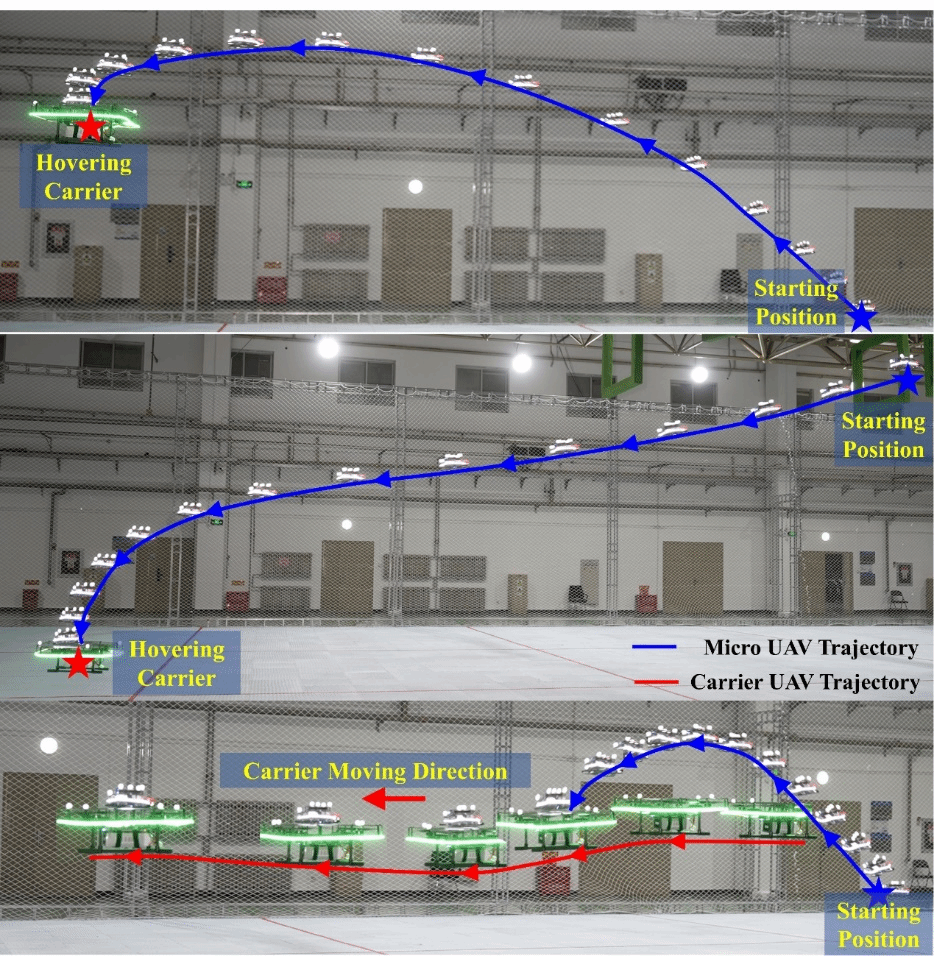
团队进一步在微型无人机和无人母机的机载电脑上部署了空中移动平台自主降落规划方法,完成了全自主降落飞行测试。测试结果表明,微型无人机可以快速、准确的降落在悬停或移动的无人母机平台上,自主降落轨迹规划时间仅需50ms,降落精度达到10cm以内。