成果发表
王志坚教授团队设计了一种自驱动多模态异质张拉整体结构,成果在国际顶级学术期刊《Advanced Materials》上发表,并入选“Editors’ Choice”专辑。
Wiley出版集团旗下顶级学术期刊《Advanced Materials》(影响因子29.4)2024年4月刊登了署名天目山实验室的研究成果 “A Multimodal Self-Propelling Tensegrity Structure”。该研究通过集成热响应主动液晶弹性体绳索、非热响应被动绳索和硬杆,构建了异质张拉整体结构。这一结构能够从外部环境中连续汲取能量并进行自驱动。通过调整液晶弹性体绳索的数量和位置,异质张拉整体结构能够响应热刺激自主地在不同的运动模态下滚动。本项研究介绍的异质张拉整体结构展示了一种新策略,并为构建自驱动和模块化智能柔性结构提供了巨大的设计空间,该工作有望应用在智能蒙皮结构、柔性展开机构等方面。论文的合作单位包括北京航空航天大学,安徽建筑大学等,天目山实验室王志坚教授为共同通讯作者。
智能柔性结构近年来得到了快速发展,相较于传统硬质机构,其具有高灵活性和可变形特性,但因承载能力差,限制了实际应用。自然界中,大多数陆地动物都会发育出肌肉骨骼系统,坚硬的骨骼和可拉伸肌肉可实现优异的灵活性和适应性,同时保持高承载能力。类似动物肌肉骨骼系统,张拉整体结构由受压硬杆和受拉弹性绳索组成,具有轻质高强、变形能力强,承载能力高,可折叠压缩和抗冲击性能优异等特点。各类张拉整体结构中,经典的六杆型张拉整体结构由6根硬杆和24根绳索组成,具有球形二十面体几何形状。张拉整体结构的滚动可通过收缩单根或多根绳索改变形状和重心来实现,但因结构复杂性和高度非线性,开发控制算法具有很大挑战性。加州大学圣地亚哥分校蔡盛强教授课题组在2019年设计了一个单根绳索收缩驱动的轻型张拉整体机器人(Adv. Mater. 2019, 31, 1806849),其中绳索由液晶弹性体-碳纳米管复合材料组成,可发生大的可逆光致变形,以实现张拉整体机器人的光驱动运动,其滚动路径可以通过光照射完全精确地控制,显示出了在软机器人领域的巨大潜力。然而,该机器人的运动需要手动控制的光照射,限制了潜在的实际应用。
在自然界中,生物系统可以从环境中获取能量,并响应外部刺激而变形。例如,向日葵具有向阳性,捕蝇草可以实现对猎物的快速捕捉。受大自然的启发,许多智能材料和结构具有物理智能,能够对环境刺激做出响应。在本工作中,杨继萍/王志坚教授团队联合安徽建筑大学李凯教授报道了一种集成热响应主动液晶弹性体绳索、非热响应被动绳索和硬杆的异质张拉整体结构,能够从外部环境中连续汲取能量,实现多模态自驱动运动。
首先,系统地讨论了自驱动异质张拉整体结构的设计策略。预拉伸的液晶弹性体绳索和被动绳索的预应力均被调整为0.075 MPa,模量均设置为0.55 MPa,以保持张拉整体结构的对称性。并且测试了预拉伸的液晶弹性体绳索在外部应力为0.075 MPa时,在热表面上能够产生高达45.1%的收缩率。其次,详细介绍了异质张拉整体结构的滚动动力学。在110 ℃ ~ 130 ℃的范围内,异质张拉整体结构能够在底部为等边三角形的状态之间连续切换,从而能够实现连续自驱动。第三,从异质张拉整体结构不同的构型出发,探索了不同的滚动模态。通过调整主动液晶弹性体绳索的数量和位置,异质张拉整体结构具有五种不同类型的循环滚动模态。此外,异质张拉整体结构还可以在外部扰动下触发不同滚动模态之间的转换。最后,进一步证明了异质张拉整体结构可以通过使用魔术贴胶带以类似乐高积木的方式简单地构建和重新组装成不同的构型,模块化的异质张拉整体结构将有利于智能柔性展开机构和行星探测机构等领域的应用。
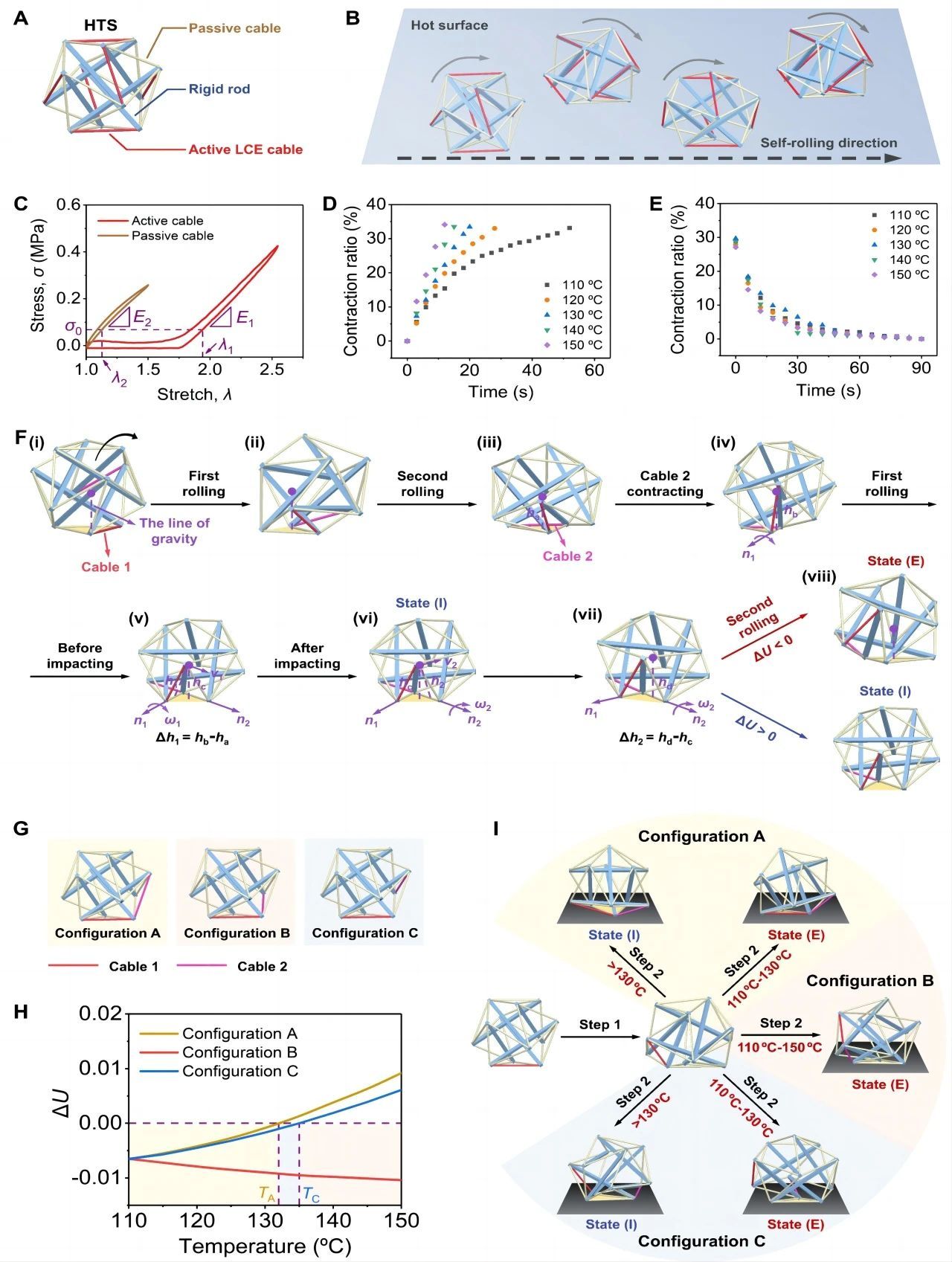
图1. 异质张拉整体结构的设计和构建
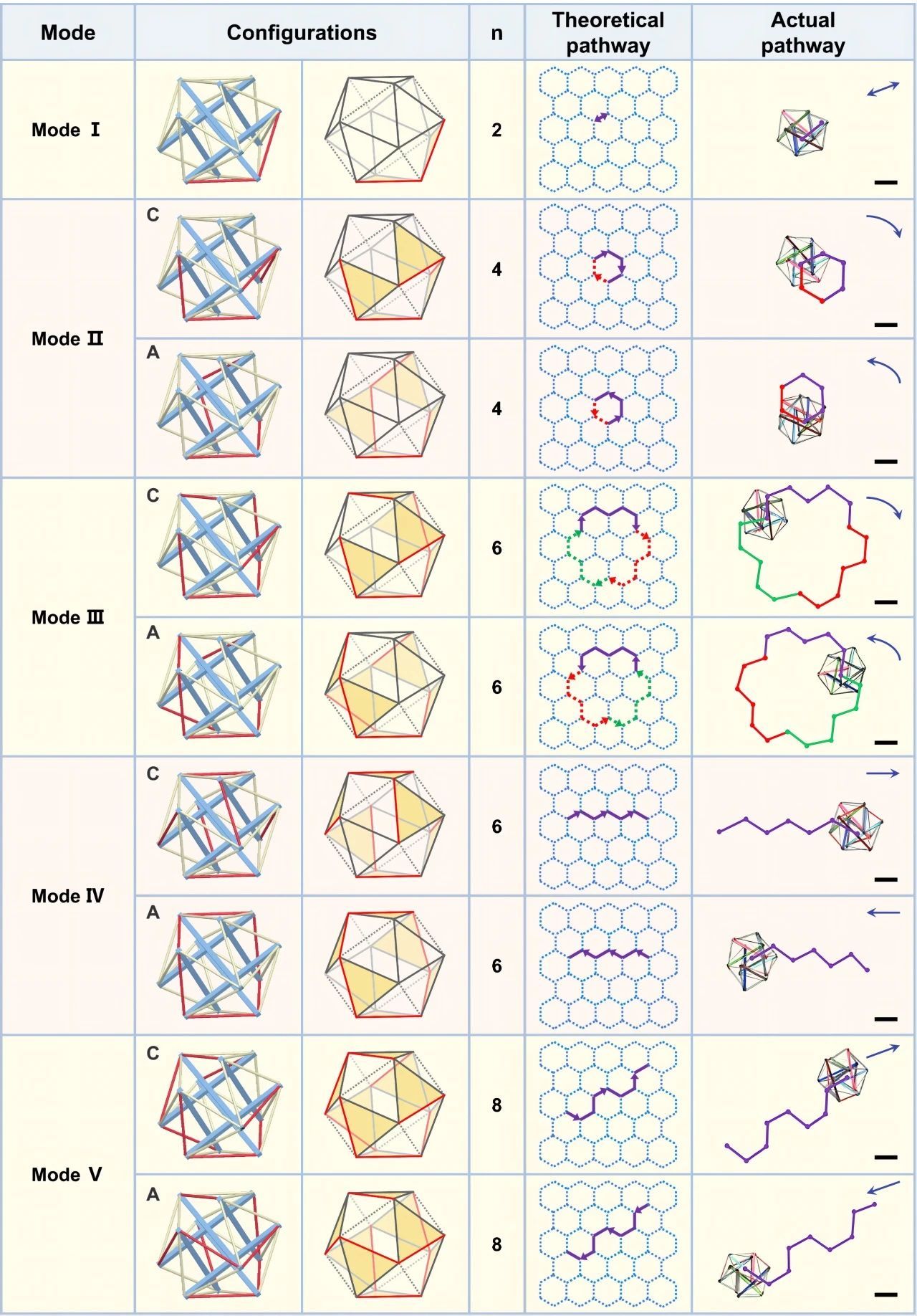
图2. 异质张拉整体结构的滚动模态
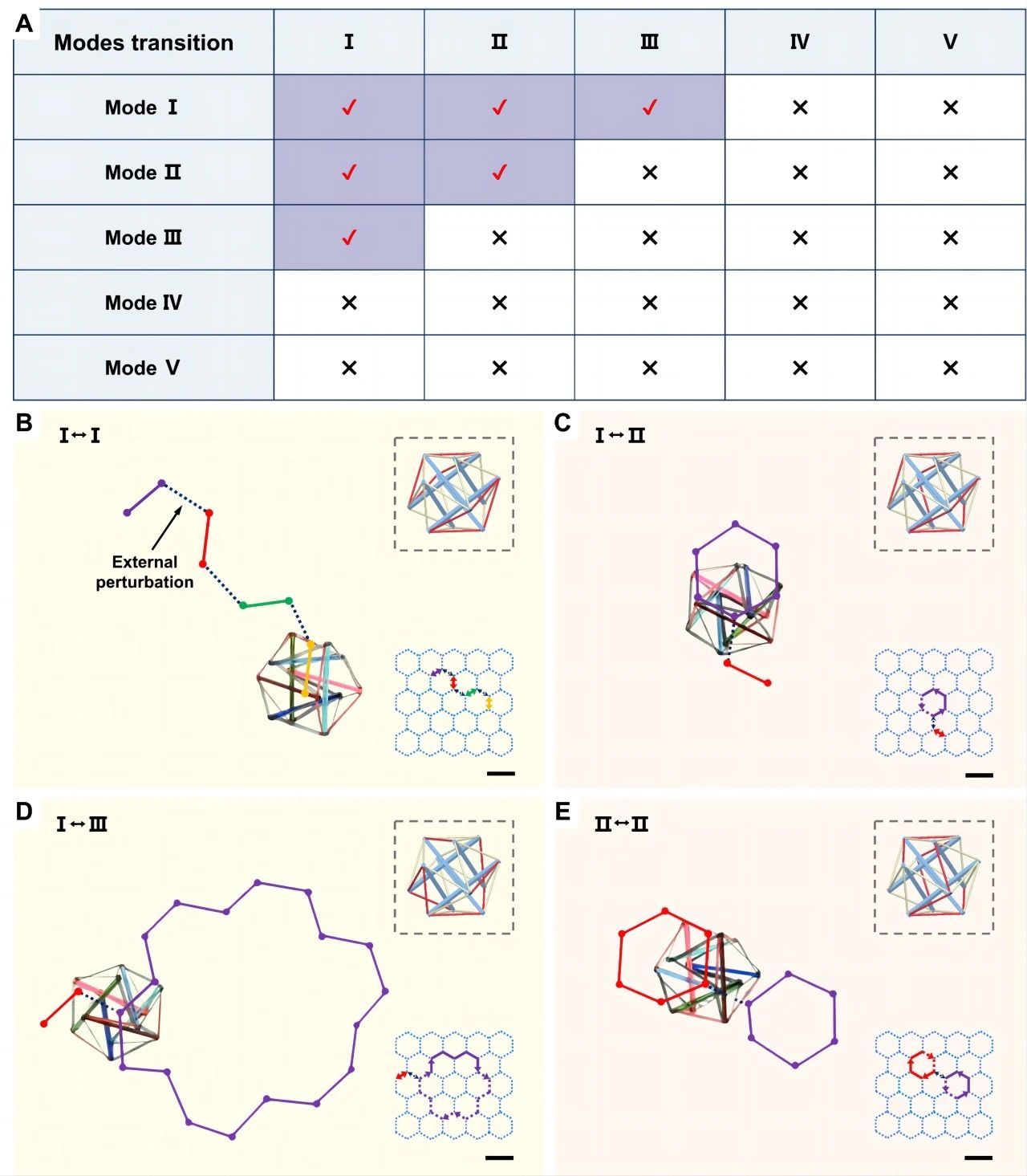
图3. 滚动模态的转换
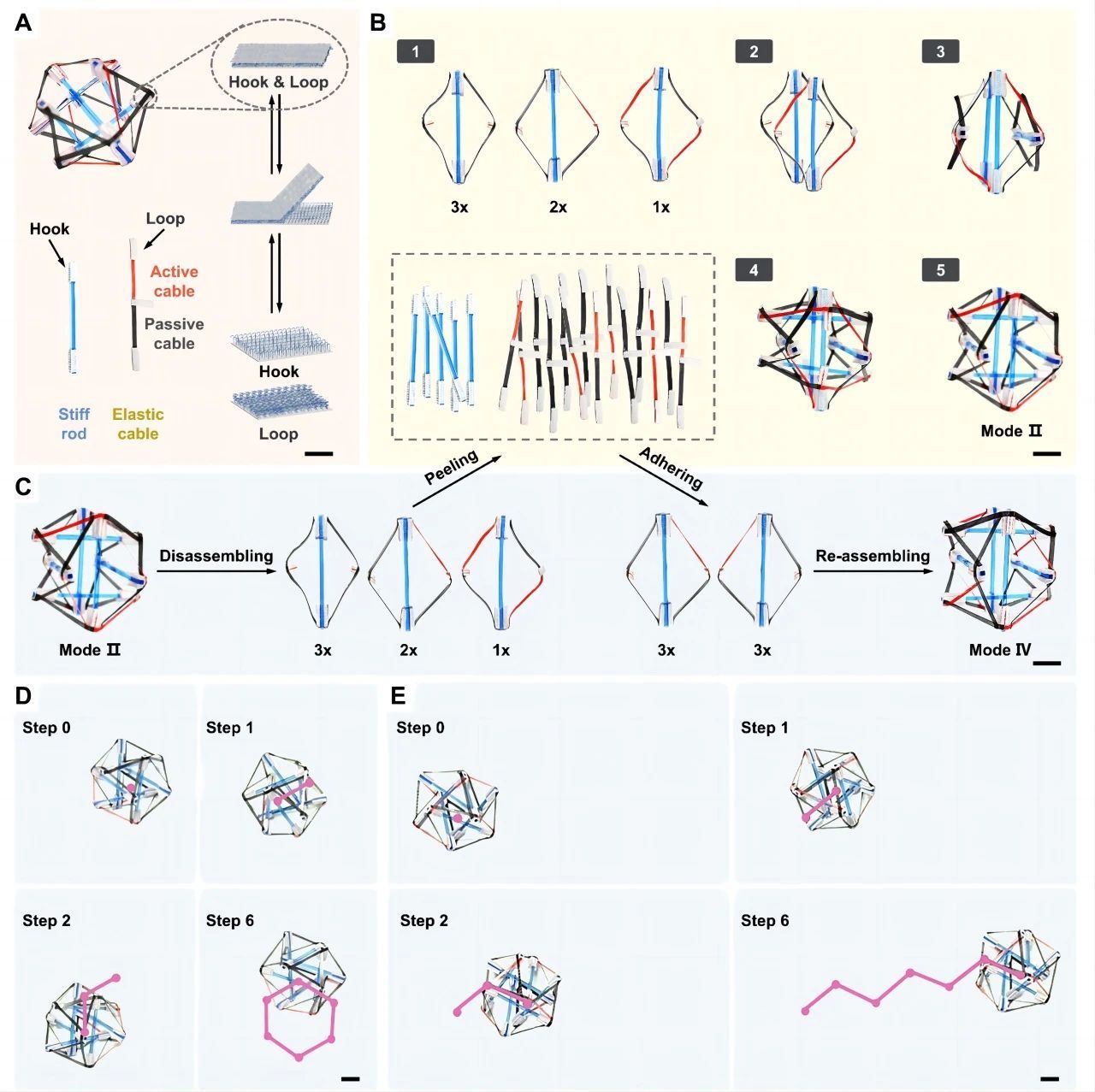
图4. 模块化异质张拉整体结构的构建和重新组装
论文链接:
https://onlinelibrary.wiley.com/doi/full/10.1002/adma.202314093
